Revisiting the Tinley Park Lights
175 strangers filed independent reports about the same thing. 96% agreed on the color. 100% agreed on the sound. I ran the data on the Tinley Park Lights.
Is it possible to control a device with your mind alone? Check out my journey exploring the science behind mind-matter interaction.

My journey exploring the science behind mind-matter interaction.
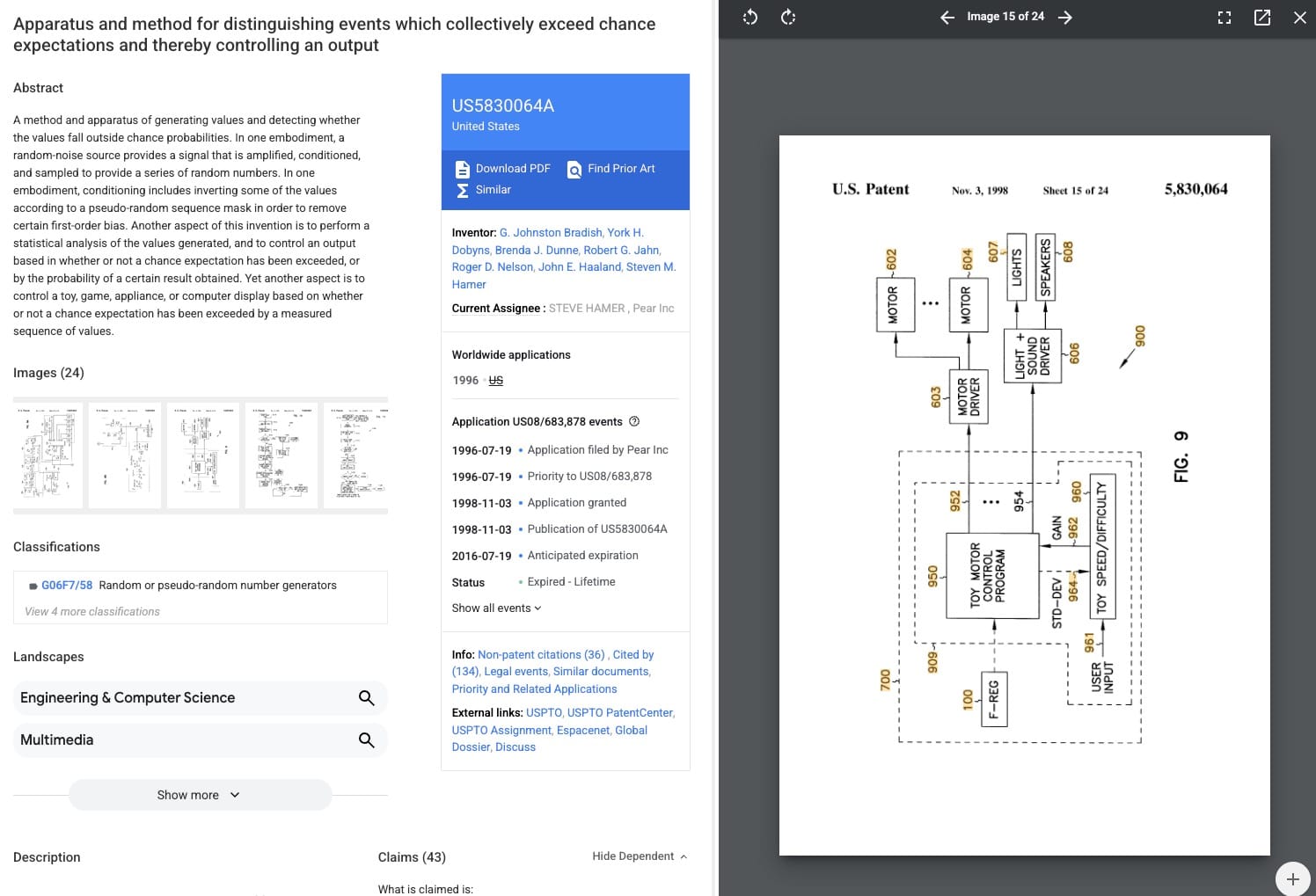
I'll walk you through my research with a system inspired by concepts outlined in US Patent 5,830,064 that potentially demonstrates how consciousness might influence physical systems. I'll explain the principles behind the setup and share the surprising results from my testing.
This is the first article in the series. Check out the second insiders-only installment for my complete research notes, including detailed hardware configuration, software implementation approach, and access to my experimental code to conduct your own investigations into this enigmatic topic.
The underlying concept of the patent is straightforward, if not provocative. It includes over 40 pages of diagrams and schematics outlining an experimental system that you could theoretically control using "force of will" alone with no physical inputs.
Approaching these types of projects always requires a certain suspension of disbelief, however after reading through the patent documentation, I realized that trying an experiment based on these principals was relatively straightforward. I already had familiarity with much of the research that supports how the device actually works.
Here's the synopsis: The system works with a stream of data from a hardware random number generator (RNG). You condition and sample these values while simultaneously focusing your intention on the device. The output can then be used to send commands that control a toy, game, or appliance.
The controlling commands are based on whether a chance expectation has been exceeded after evaluating a sequence of RNG values. In a nutshell, the question being asked is: can focused intention somehow influence the distribution of generated random numbers in a predictable way to operate a system? For example, imagine being able to start your car by just thinking about it.
My system uses an off-the-shelf hardware random number generator, a fair amount of open source software, and a small inexpensive robotics kit. The RNG output drives a robotic motor either forward or backward based on the operator's focused intention.
This short clip shows the device in operation.
The dashboard below shows an example of the data that I captured during the experiments.

If you've made it this far, you're probably wondering if my experimental system actually produced measurable results. Well, the outcomes legitimately surprised me.
Here's the tl;dr: After testing my research prototype, I have to admit that the data suggests a possibility of a legitimate but weak effect.
My experiment involved placing the robot at the center of a small table. I positioned color-coded labels marked "0" and "1" at short distances in front of and behind it.
During each trial, the robot retrieves a stream of random 0's or 1's from my server over WiFi. Based on these values, it moves a very short distance either forward (for 1's) or backward (for 0's). While this process occurs, the research participant attempts to influence the robot toward a predetermined direction using focused concentration. The participant focuses their intention on affecting the values being generated in real-time by the hardware random number generator.
The trial concluded when the robot eventually traveled all the way to either the forward or backward edge of the table where the labels were positioned. If the random number generator produced more 1's, the apparatus would ultimately reach the forward edge. Conversely, if more 0's were generated, it would reach the backward edge.
Observing the robot during the trial revealed an interesting movement pattern. It would continually shift back and forth, gaining ground and then losing ground—creating a visual similar to a tug-of-war until reaching its final destination.
The research in question was whether the robotic apparatus would reach the '1' label (in front of it) more frequently than the '0' label (behind it) beyond what statistical chance alone would predict.
In a perfectly random system, we would expect a relatively even 50/50 distribution of outcomes regarding which target the robot ultimately reached. To control for potential biases, I conducted additional trials where I repositioned the '1' label behind the robot instead of in front of it, asking the research participant to attempt influencing the robot's movement backward through concentrated intention alone.
These research trials were relatively short in duration - typically requiring only about 30-100 random numbers for the robot to reach one side of the table or the other. Given the limited sample size I worked with (approximately 20 trials), it's entirely possible that any observed directional bias in the aggregated results could fall completely within the realm of statistical chance expectations
What was much more surprising was that the analyzed data appeared to reveal distinctive patterns in certain successful trials compared to others. To explain what I mean, I need to provide additional context regarding the methodology used for selecting and transmitting random numbers to the robot.
There have been decades of academic investigation into whether conscious attention or focused intention might correlate with patterns in random number generation. Notable research includes the Global Consciousness Project originally affiliated with Princeton's PEAR Labs, along with studies conducted by scientists such as Dr. Dean Radin, Dr. George Robert Jahn, and Dr. Roger D. Nelson.
The crux of many of these studies examines whether focused intention might be associated with statistical anomalies in the distribution of random numbers—specifically, whether ordering or skew can be detected across large sample sizes.
Notably, these studies suggest that such potential correlations appear primarily when working with random numbers generated by natural physical processes. This is important because it means that computer-generated random numbers, which use pseudo-random number generators (essentially algorithmic formulas), would not be suitable for manifesting these potential consciousness-related effects.
This is why I used a hardware random number generator (RNG) for this project. While building a device is possible as a DIY project, I opted instead for a prebuilt solution from OneRNG. They offer a USB-based hardware RNG that utilizes an avalanche diode circuit. This particular model provides excellent flexibility, being compatible with multiple operating systems and computer types.
Now with a reliable way to generate quantum-based random numbers, the next research phase involved developing a methodology to condition or sample these values in a way that might potentially detect or amplify any consciousness-intention effects.
I've written about this at length in the second article of this series, but i believe that implementing a Markov chain computational model for processing the RNG values before transmission to the robot was a critical factor in the observed results.
A Markov chain is a stochastic model that describes a sequence of possible events where the probability of each event depends only on the state of the previous event. In the context of generating output values, it works by:
This memoryless property (where only the current state matters) makes Markov chains useful for applications where you need to produce sequences with statistical patterns.
I learned about this technique while reading "Real Magic" by Dr. Dean Radin. While it's not explicitly detailed in the patent, my analysis of the documentation suggests that the use of a similar approach was likely intended.
In his book, Radin describes an experiment investigating consciousness-physical system interaction using an RNG with a Markov chain processing method. Notably, one of Radin's publications, 'Evidence for Consciousness-Related Anomalies in Random Physical Systems,' is cited as a reference in the patent itself, so I thought I might be on to something.
For this project I used a three stage, two state Markov chain. The diagram below provides a conceptual representation of how this works.
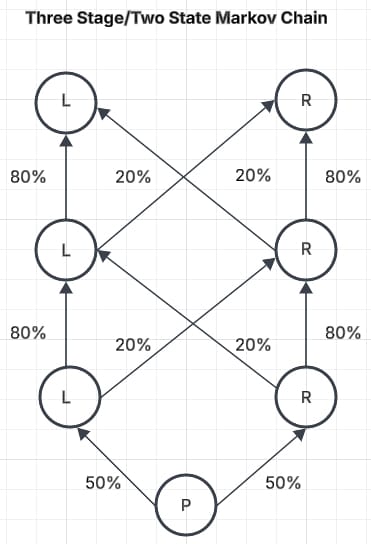
Starting at the bottom with the hardware RNG output, there's a 50/50 chance of the value leading to either the left or right path at Stage 1. For the subsequent two stages, additional random values between 0-255 are generated. Based on these values' ranges, there's an 80% probability that the processing will remain on the same directional path until reaching the end of the chain. At the conclusion, either a 0 or 1 is produced as the final output depending on whether the process ultimately terminates on the left or right side.
The use of this Markov chain computational model provides the research subject with three potential opportunities to mentally "nudge" the random values' directional tendency (either toward the left or right path) before generating the final output bit. This output—either a '1' (left path) or a '0' (right path)—is then transmitted to the robot.
Upon receiving these values, the robot directs its motor to move either forward in response to a '1' or backward in response to a '0'."
During each trial, the system captures and charts data in real-time. Below is an example of the analysis dashboard. I record various metrics including the frequency distribution of 1's and 0's generated by the hardware RNG, the robotic apparatus motor control values, progression pathways through the Markov chain computational model, and additional relevant parameters.

The experiment runs typically lasted approximately 5 to 10 minutes each. I conducted over 20 trials with different research participants attempting to mentally influence the direction of the robot. In one variation, I asked multiple participants to focus their intention simultaneously, hoping for a potential compounding effect. (Data from this approach did not reveal any notable differences compared to single-participant trials).
In another protocol, I placed a pillow on the floor beyond the forward edge of the table, with no protective surface behind the robot. The objective of the test subject was to make sure that the robot ultimately fell on the pillow in front of it rather than hitting the floor behind it and potentially suffering catastrophic damage. There was method to my madness here as that existing literature suggests establishing some type of emotional attachment or resonance with the target device might correlate with more pronounced effects in consciousness-related studies.
Ultimately the outcomes yielded results were about the same as what could be predicted by chance alone - showing a marginally higher success rate than the expected 50/50 split, but not reaching the threshold for statistical significance.
A note to my dear readers: Could I have applied more scientific rigor to these experiments? Absolutely.
I ran a limited number of short duration trials, and my aggregated results did not reach statistical significance. I could have improved the protocols: I didn't test against the null hypothesis, additional trials of longer duration would provide better daya, I could have run diehard tests on my hardware RNG to verify the absence of inherent bias or skew.
However, despite these acknowledged shortcomings, there were specific observations that I thought were genuinely surprising...
Take a look at this set of charts below.

The charts on this dashboard depict two trials conducted in sequence. On the surface they both appear to be 'hits' or successful outcomes in that the Sparki robot ultimately moved to the intended target that was placed in front of it. You can see this in the top chart, which shows a higher frequency of 1's being transmitted to the robot compared to 0's. (The extended angular line indicates a time gap between the two tests where no data was received.)
Upon closer examination, however, you can see distinct differences in the data patterns between these trials and I would suggest that the second test is far more intriguing than the first.
Of particular interest is the "Markov Stage Counter" chart in the center right section of the dashboard.

This chart tracks the probability pathway positions (Left/Right) in the Markov chain across each processing stage before a final binary output (1 or 0) is transmitted to the robot to control directional movement. There are two distinct patterns that can be observed here.
The chart on the left, representing the first trial, displays a pattern consistent with statistical expectations. The stage counts increment in unison throughout the process, indicating minimal transitioning between pathways in the chain. This is what would be expected with the established 80% probability of pathway persistence.
The chart on the right, however, paints a different picture. Multiple instances can be observed where the stage progressions do not increment in parallel - indicating that at various decision points, the lower probability pathway transition (only a 20% likelihood) was selected. For instance the initial coin-flip random value might register as 0 (designating the right pathway for stage 1), but then transitions to the left pathway at the subsequent stage (potentially showing correlation with participant intention) - an event with only a 20% chance of occurrence under random conditions.
These two charts for the same trials are also intriguing.

The "Motor Values" chart (left center) chart for the second trial shows a distinctive and unusual progression of sequential "1" values transmitted to the robot. This means that the robot was advancing forward with consistent directionality, without the typical oscillating pattern observed for most trials - a departure from the typical "tug of war" behavior where the system typically alternates between forward or backward movements for a few pulses at a time.
The right center "RNG Skew" chart just presents a cumulative count of 0's and 1's. You can clearly see that during the second trial significantly more 1's were generated than 0's, representing a departure from the expected probability distribution under purely random conditions.
Ultimately, the second trial left me intrigued that perhaps there was some type of odd effect worthy of further investigation.
And this is where my research currently stands.
I believe there are a number of ways to improve the experiment protocols and methodology. The Markov chain model could potentially be optimized by adding additional processing states or decision stages. Alternative hardware random number generators using different physical processes might yield different results. Multiple RNGs operating in parallel could provide another interesting variation.
Perhaps future researchers can attempt these variations.
If you're interested in attempting something similar, examining my findings independently, or just curious to learn more about my system - consider becoming an Insider to access the second article in this series. Here I share detailed documentation on the hardware and software configuration used for my investigations.
This is an really interesting topic, and my hope is that others will build on the approach presented and have success when comparing their observations with what I've documented here.
Dear subscriber, as you can see from the types of topics I cover, I do not write for a search algorithm and I do NOT display ads of any kind. If you like this content, please consider becoming a member to keep this site going! Also, if you enjoyed this article please consider sharing on social media! Thank you again for your support and readership.

I don't expect you to believe this. But you have to acknowledge the timeline: Bitcoin mining and the Mandela Effect didn't just emerge around the same time. They scaled together. Perfectly. The correlation begs an explanation, even if that explanation sounds insane.

Avi Loeb just wrote a Medium article about the interstellar comet I3/Atlas - and while the comet itself is interesting, his commentary on the state of science today is the real takeaway

If we exist within a simulation, we cannot "break out" of it. This isn't a practical limitation—it's a logical impossibility. Instead can we use random behavior to let our simulators know we're on to them?

Is it possible to control a device with your mind alone? Check out my journey exploring the science behind mind-matter interaction in this two-part series.